3. Interpolation and extrapolation of calibration data
[1]:
%matplotlib inline
[2]:
from meas_data_preprocessing import *
from hydrophone_data_preprocessing import *
[3]:
from PyDynamic.uncertainty.interpolate import interp1d_unc
Read measured data and calibration data from file
[4]:
meas_scenario = 13
infos, measurement_data = read_data(meas_scenario=meas_scenario)
_, hyd_data = read_calib_data(meas_scenario=meas_scenario, do_plot=False)
Checking if file ../datasets/pD7_MH44.DAT is already present or download it from https://raw.githubusercontent.com/Ma-Weber/Tutorial-Deconvolution/master/MeasuredSignals/pD-Mode%207%20MHz/pD7_MH44.DAT otherwise:
Replace is False and data exists, so doing nothing. Use replace=True to re-download the data.
Checking if file ../datasets/pD7_MH44r.DAT is already present or download it from https://raw.githubusercontent.com/Ma-Weber/Tutorial-Deconvolution/master/MeasuredSignals/pD-Mode%207%20MHz/pD7_MH44r.DAT otherwise:
Replace is False and data exists, so doing nothing. Use replace=True to re-download the data.
Checking if file ../datasets/MW_MH44ReIm.csv is already present or download it from https://raw.githubusercontent.com/Ma-Weber/Tutorial-Deconvolution/master/HydrophoneCalibrationData/MW_MH44ReIm.csv otherwise:
Replace is False and data exists, so doing nothing. Use replace=True to re-download the data.
The file ../datasets/pD7_MH44.DAT was read and it contains 2500 data points.
The time increment is 2e-09 s
Checking if file ../datasets/pD7_MH44.DAT is already present or download it from https://raw.githubusercontent.com/Ma-Weber/Tutorial-Deconvolution/master/MeasuredSignals/pD-Mode%207%20MHz/pD7_MH44.DAT otherwise:
Replace is False and data exists, so doing nothing. Use replace=True to re-download the data.
Checking if file ../datasets/pD7_MH44r.DAT is already present or download it from https://raw.githubusercontent.com/Ma-Weber/Tutorial-Deconvolution/master/MeasuredSignals/pD-Mode%207%20MHz/pD7_MH44r.DAT otherwise:
Replace is False and data exists, so doing nothing. Use replace=True to re-download the data.
Checking if file ../datasets/MW_MH44ReIm.csv is already present or download it from https://raw.githubusercontent.com/Ma-Weber/Tutorial-Deconvolution/master/HydrophoneCalibrationData/MW_MH44ReIm.csv otherwise:
Replace is False and data exists, so doing nothing. Use replace=True to re-download the data.
[5]:
# metadata for chosen measurement scenario
for key in infos.keys():
print("%20s: %s" % (key, infos[key]))
i: 13
hydrophonname: GAMPT MH44
measurementtype: Pulse-Doppler-Mode 7 MHz
measurementfile: ../datasets/pD7_MH44.DAT
noisefile: ../datasets/pD7_MH44r.DAT
hydfilename: ../datasets/MW_MH44ReIm.csv
Perform basic pre-processing
[6]:
# remove DC component in measured data
measurement_data = remove_DC_component(measurement_data)
[7]:
# reduce frequency range of calibration data
hyd_data = reduce_freq_range(hyd_data, fmin=1e6, fmax=100e6)
Align spectral data of calibration and measured data
[8]:
measurement_data = uncertainty_from_noisefile(
infos, measurement_data, do_plot=False, verbose=False
)
measurement_data = calculate_spectrum(measurement_data, do_plot=False)
fmeas = measurement_data["frequency"].round()
N = len(fmeas) // 2
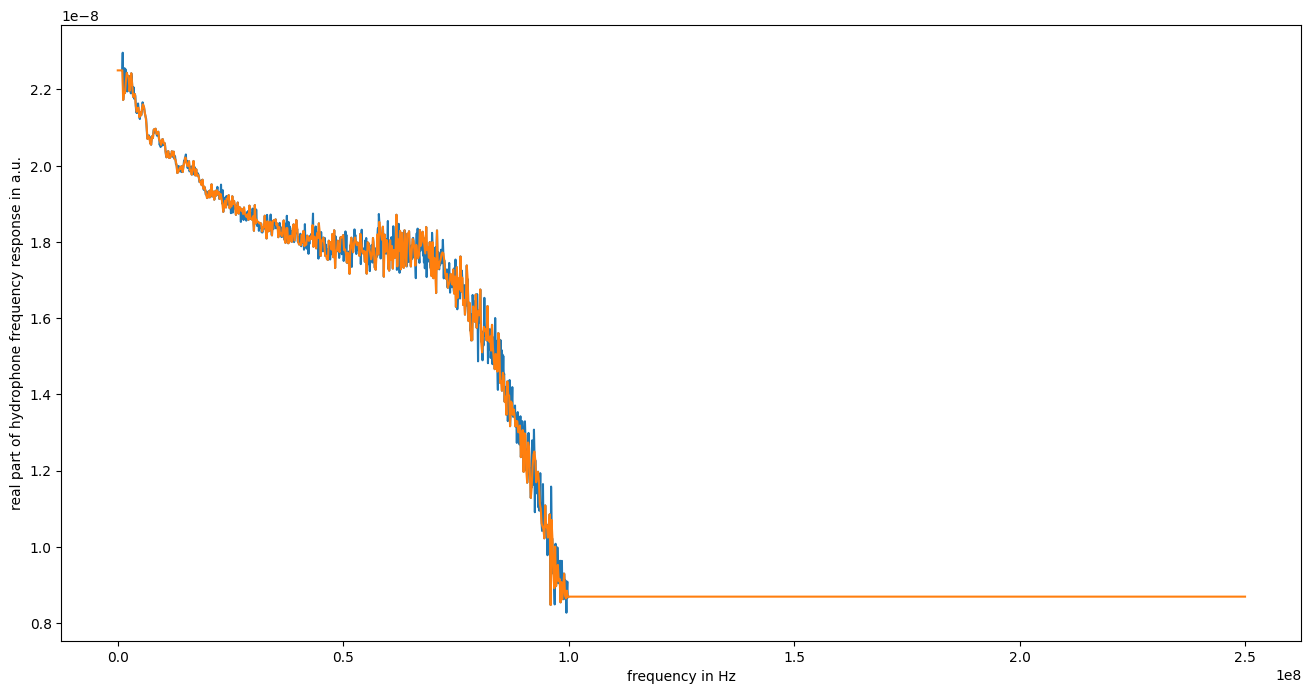
Interpolation of real part
[9]:
hyd_interp = dict([])
(
hyd_interp["frequency"],
hyd_interp["real"],
hyd_interp["varreal"],
Creal,
) = interp1d_unc(
fmeas[:N],
hyd_data["frequency"],
hyd_data["real"],
hyd_data["varreal"],
bounds_error=False,
fill_value="extrapolate",
fill_unc="extrapolate",
returnC=True,
)
[10]:
figure(figsize=(16, 8))
plot(hyd_data["frequency"], hyd_data["real"])
plot(hyd_interp["frequency"], hyd_interp["real"])
xlabel("frequency in Hz")
ylabel("real part of hydrophone frequency response in a.u.")
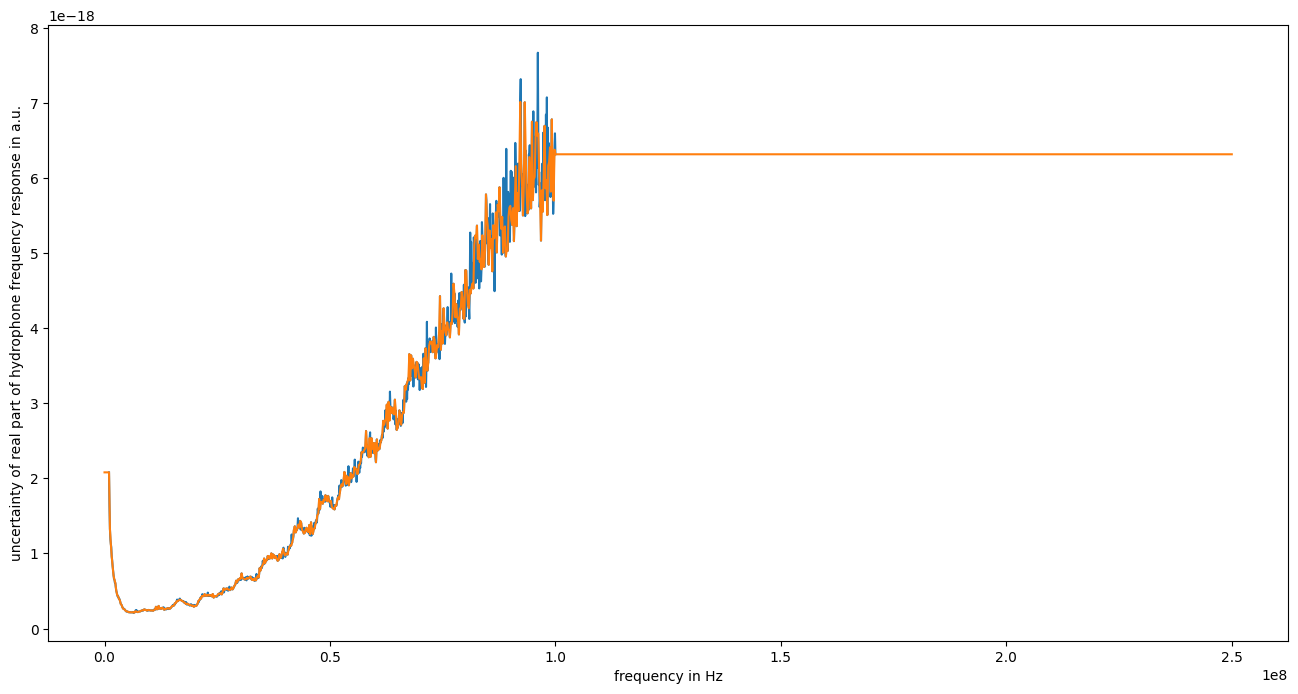
figure(figsize=(16, 8))
plot(hyd_data["frequency"], hyd_data["varreal"])
plot(hyd_interp["frequency"], hyd_interp["varreal"])
xlabel("frequency in Hz")
ylabel("uncertainty of real part of hydrophone frequency response in a.u.")
show()
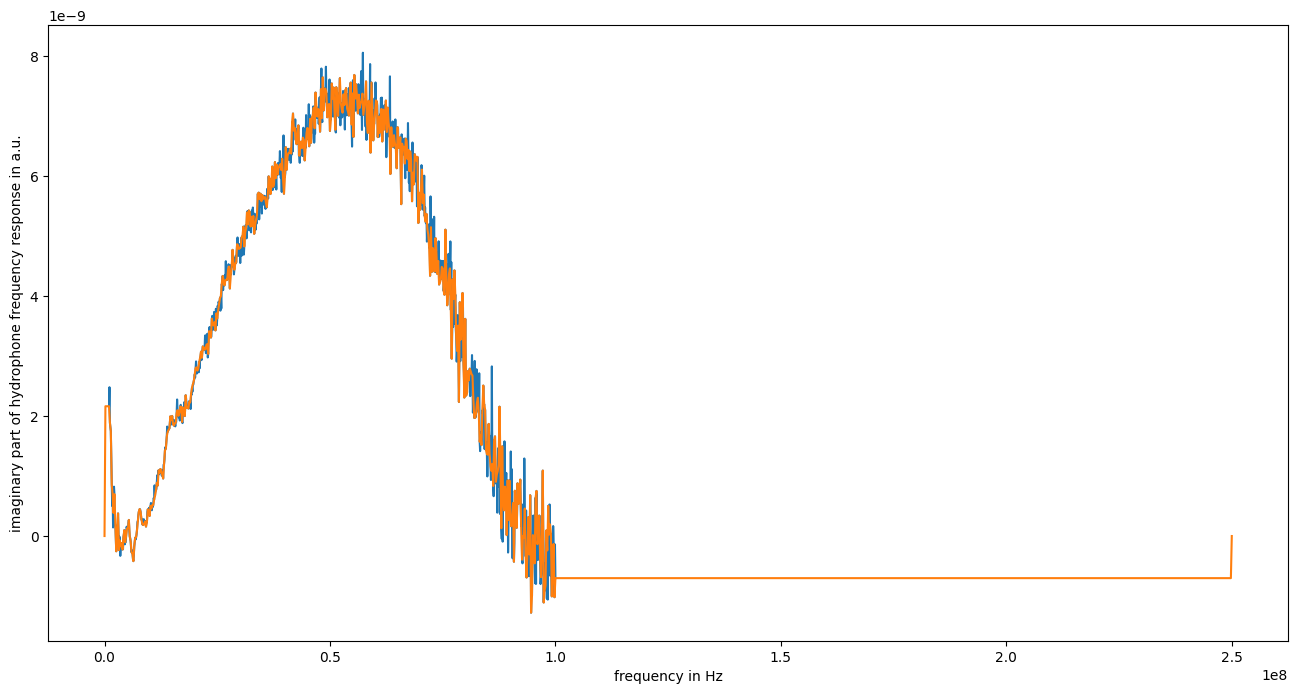
Interpolation of imaginary part
[11]:
(
hyd_interp["frequency"],
hyd_interp["imag"],
hyd_interp["varimag"],
Cimag,
) = interp1d_unc(
fmeas[:N],
hyd_data["frequency"],
hyd_data["imag"],
hyd_data["varimag"],
bounds_error=False,
fill_value="extrapolate",
fill_unc="extrapolate",
returnC=True,
)
# adjustment of end points
hyd_interp["imag"][0] = 0 # Must be 0 by definition
hyd_interp["imag"][-1] = 0
hyd_interp["varimag"][0] = 0 # Must be 0 by definition
hyd_interp["varimag"][-1] = 0
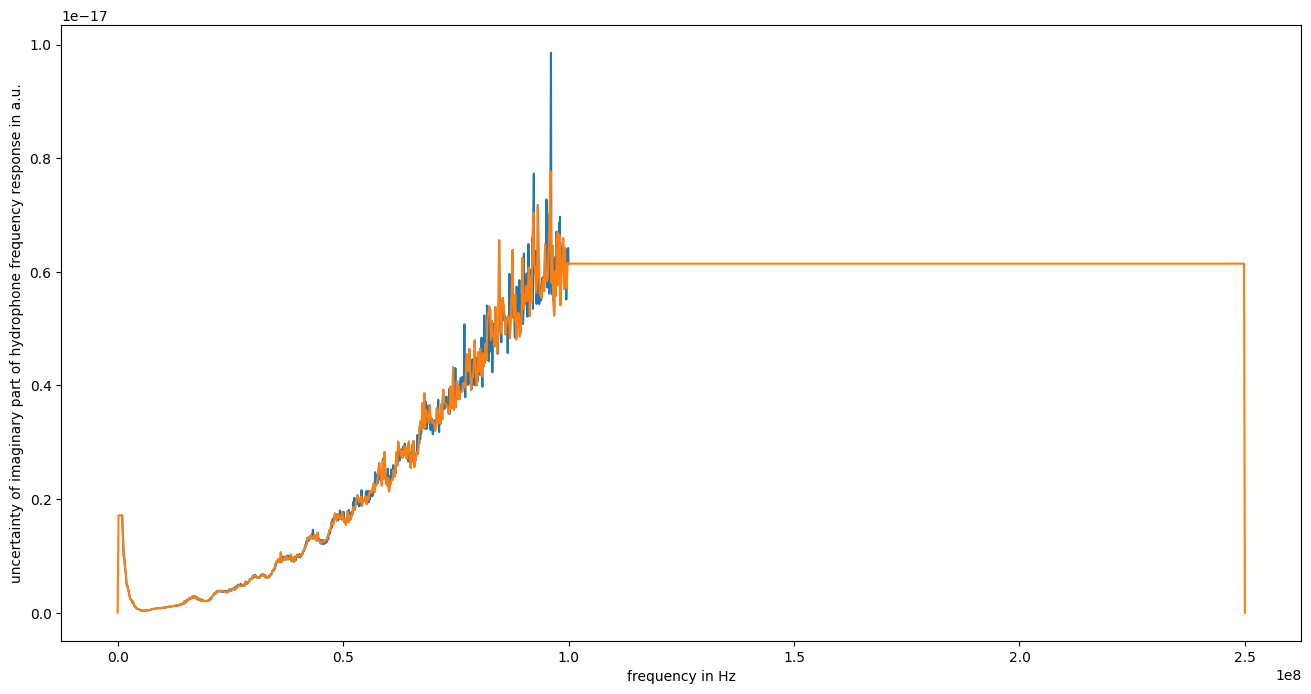
[12]:
figure(figsize=(16, 8))
plot(hyd_data["frequency"], hyd_data["imag"])
plot(hyd_interp["frequency"], hyd_interp["imag"])
xlabel("frequency in Hz")
ylabel("imaginary part of hydrophone frequency response in a.u.")
figure(figsize=(16, 8))
plot(hyd_data["frequency"], hyd_data["varimag"])
plot(hyd_interp["frequency"], hyd_interp["varimag"])
xlabel("frequency in Hz")
ylabel("uncertainty of imaginary part of hydrophone frequency response in a.u.")
show()
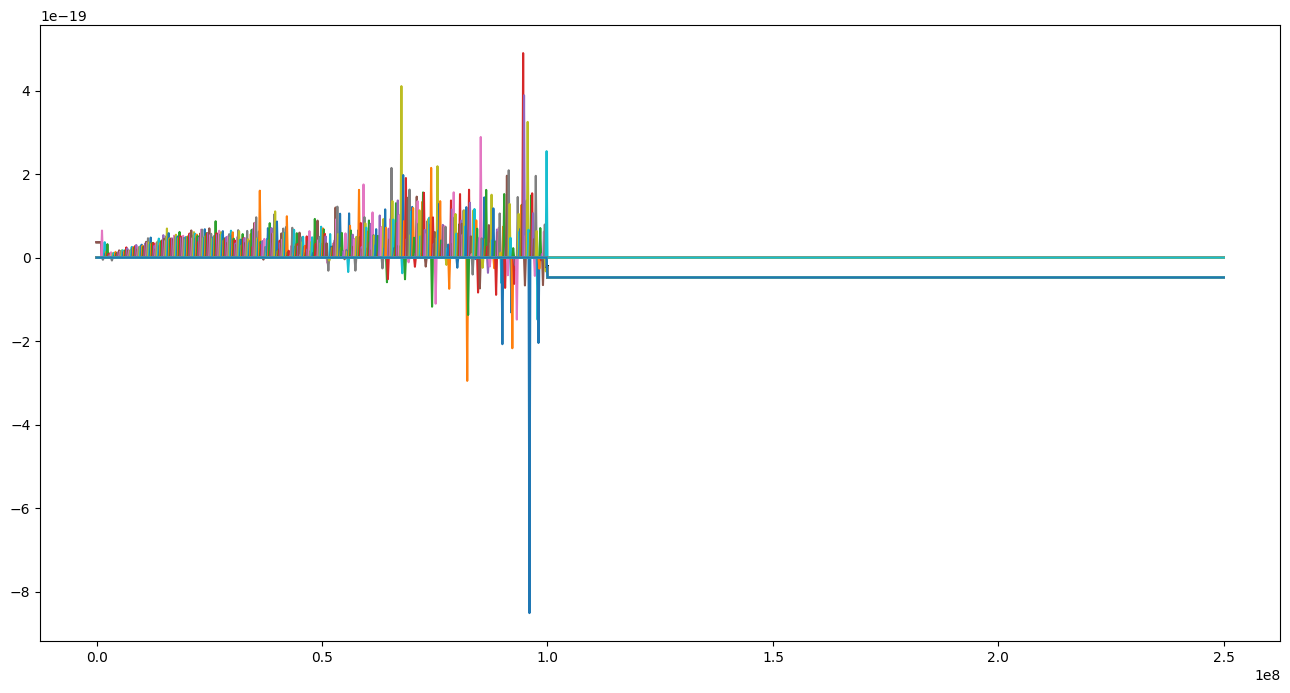
Calculation of mixed uncertainties at new frequencies
\[U_{r_{interp},i_{interp}} = C_{r} U_{r,i} C_{i}^T\]
[13]:
hyd_interp["cov"] = (Creal.dot(np.diag(hyd_data["cov"]))).dot(Cimag.T)
[14]:
figure(figsize=(16, 8))
plot(hyd_interp["frequency"], hyd_interp["cov"])
show()